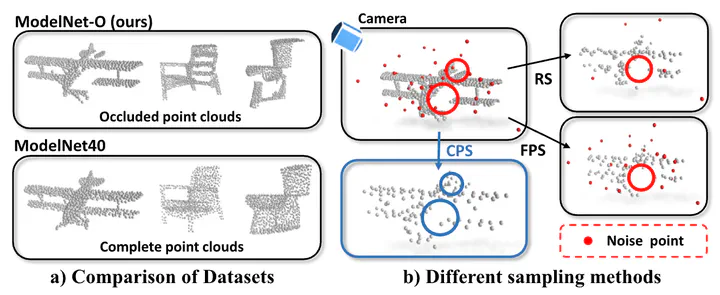
ModelNet-O: A large-scale synthetic dataset for occlusion-aware point cloud classification
Jun 19, 2024·
 ,
,
,
·
0 min read
,
,
,
·
0 min read
Zhongbin Fang
Xia Li
Xiangtai Li
Shen Zhao
Mengyuan Liu
Abstract
Point cloud classification is a fundamental task in 3D computer vision, but existing datasets often lack realistic occlusion scenarios that are common in real-world applications. To address this limitation, we introduce ModelNet-O, a large-scale synthetic dataset specifically designed for occlusion-aware point cloud classification. ModelNet-O contains diverse occlusion patterns and complex object arrangements, providing an ideal testbed for evaluating and improving point cloud classification algorithms under occlusion conditions. The dataset includes multiple occlusion types such as partial occlusion, self-occlusion, and inter-object occlusion, enabling comprehensive evaluation of model robustness. We provide extensive experimental results on ModelNet-O, demonstrating the challenges posed by occlusion and the effectiveness of various baseline methods.
Type
Publication
Computer Vision and Image Understanding